15/04/2024 Progress (NX Model modifications: Integrating IRB1100 Robotic arm and New excess pieces' slide)
- mohshaat12
- Apr 15, 2024
- 2 min read
Updated: Apr 24, 2024
As previously mentioned, I've been exploring ways to enhance the physical/CAD model of the MPS system itself. Expanding on these ideas, I've modeled the excess orders' slide in SolidWorks and integrated it into the NX model. Positioned at the end of the conveyor belt with a slight tilt of -5 degrees, this addition ensures that pieces slide easily into the container. This implementation enables the system to accommodate up to three orders, each with its designated slide, a significant improvement from its previous capacity of two. Additionally, the fourth slide is designated for excess pieces. Furthermore, I've introduced a slide separator designed for Order 3, enhancing the organisation and efficiency of the system. The new model, showcasing these enhancements, is depicted in the figure below.

Figure 1: Excess workpieces slide along with an extra slide separator
Continuing with the improvements, I've incorporated a CAD model of the IRB1100 robot arm into my NX model as shown in the figure below. This model closely resembles the actual robot arm, and I plan to use it to enhance efficiency in my simulation. With a reach of nearly 0.5 meters, this robot arm is well-suited for the tasks in my model. One advantage it offers is its grippers, which are more effective than suction cups in this scenario. When picking up workpieces with lids, the grippers ensure a secure hold on both the workpiece and the lid, preventing any mishaps. In contrast, a suction cup might only grab the lid in some instances, causing the workpiece to fall. This improvement streamlines the disassembly process and improves overall performance in the simulation. Additionally, this upgrade enhances the disassembly process and boosts overall performance. Moreover, it's a cost-effective alternative to manual labor, highlighting the importance of technology in efficiency and cost savings. [CAD file was from: robotic arm - Recent models | 3D CAD Model Collection | GrabCAD Community Library]
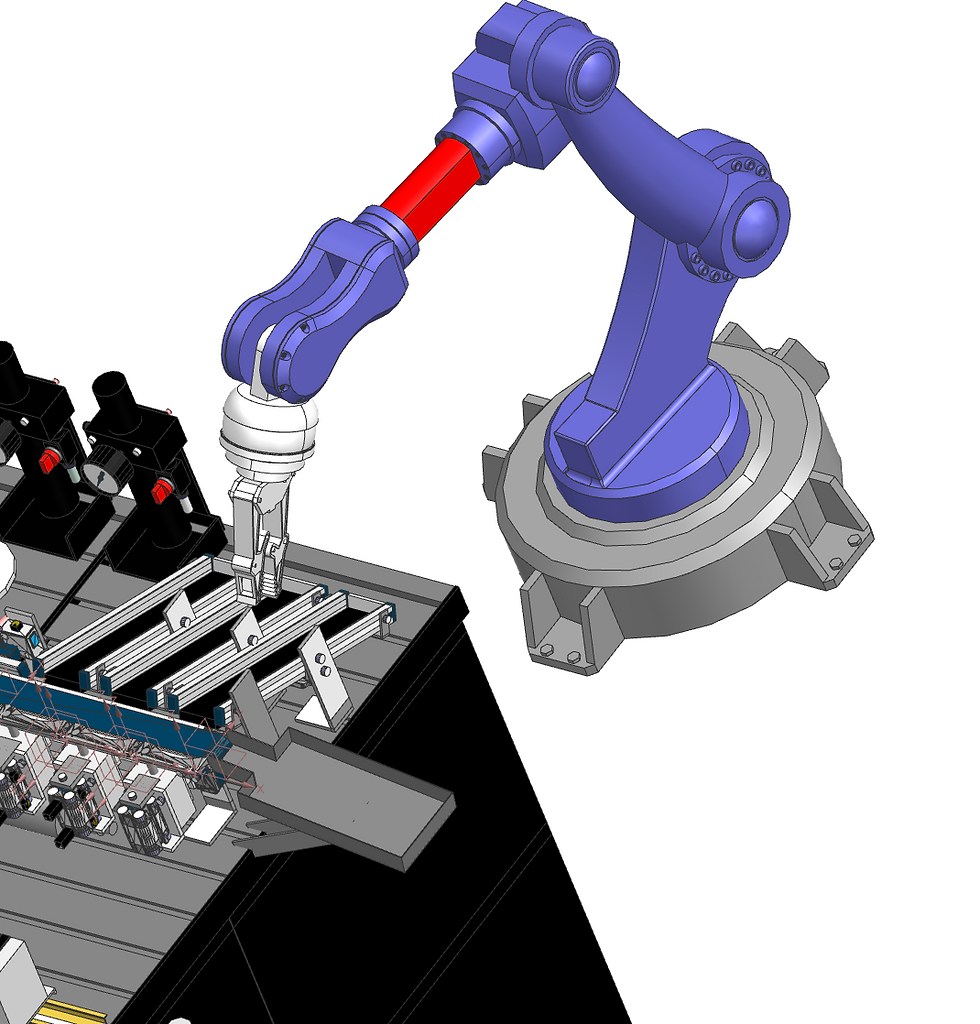
Figure 2: Excess workpieces slide along with an extra slide separator

Comments